
CGMath实践
在CGMath中实现如下封装:
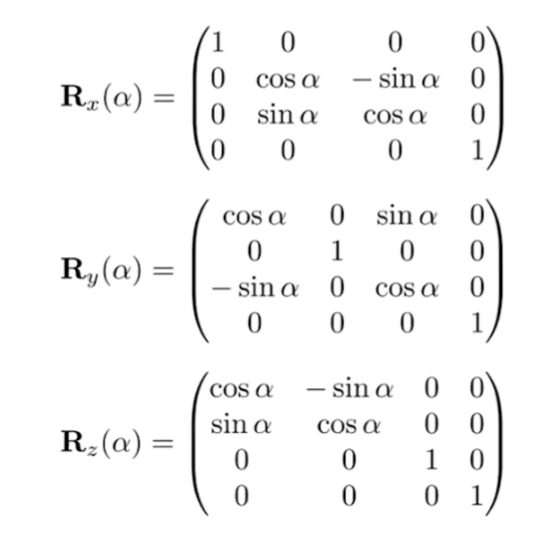
三维坐标绕xyz轴旋转变换
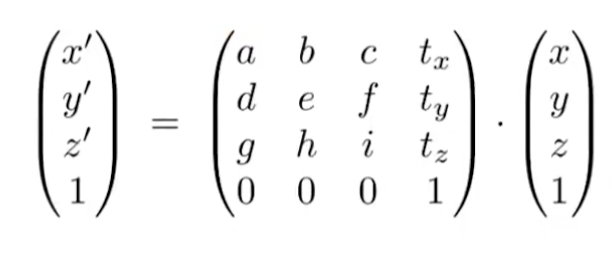
3D Transforms 3维变换
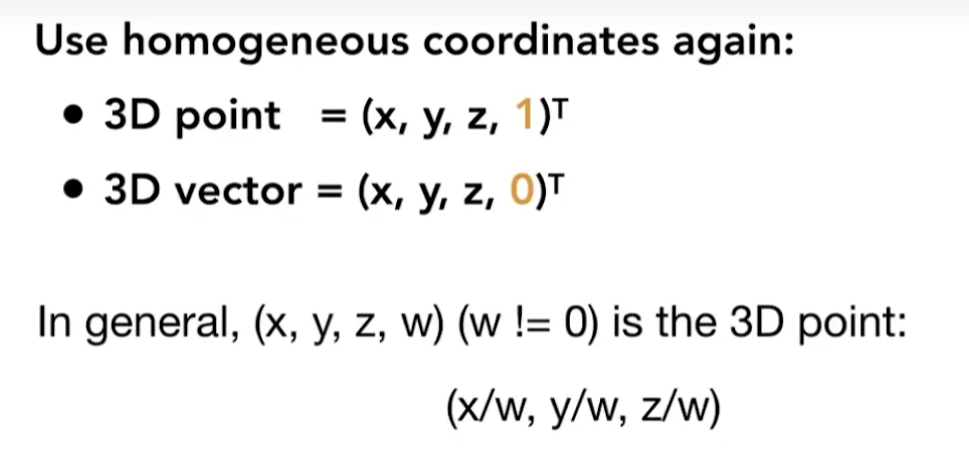
3维坐标齐次化
- 点齐次坐标末尾为1,表示可以参与平移变换
3维向量齐次化
- 向量齐次坐标末尾为0,表示不受平移影响
缩放因子w
- w是齐次坐标的缩放因子
- w=1:表示标准齐次坐标
- w≠1:通过除以w归一化得到实际坐标
- 透视投影中,w通常表示深度
3D Rotation 三维旋转
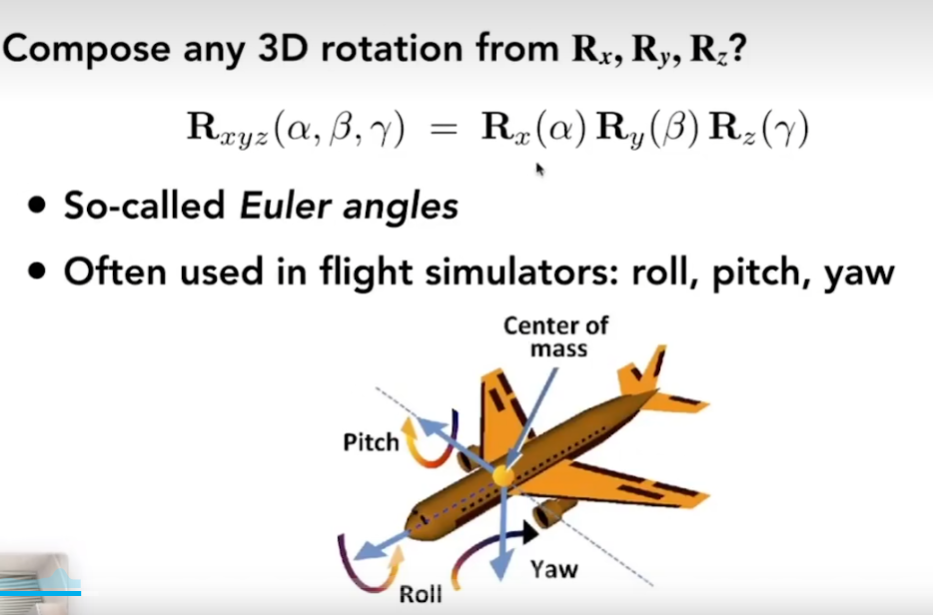
Compose 3D Rotation 欧拉角公式
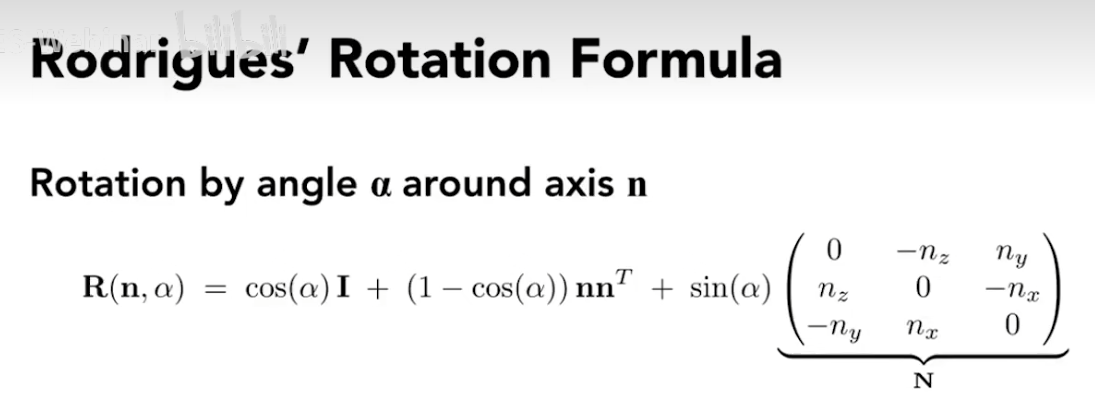
Rodrigues' Rotation Formula 罗德里格斯公式
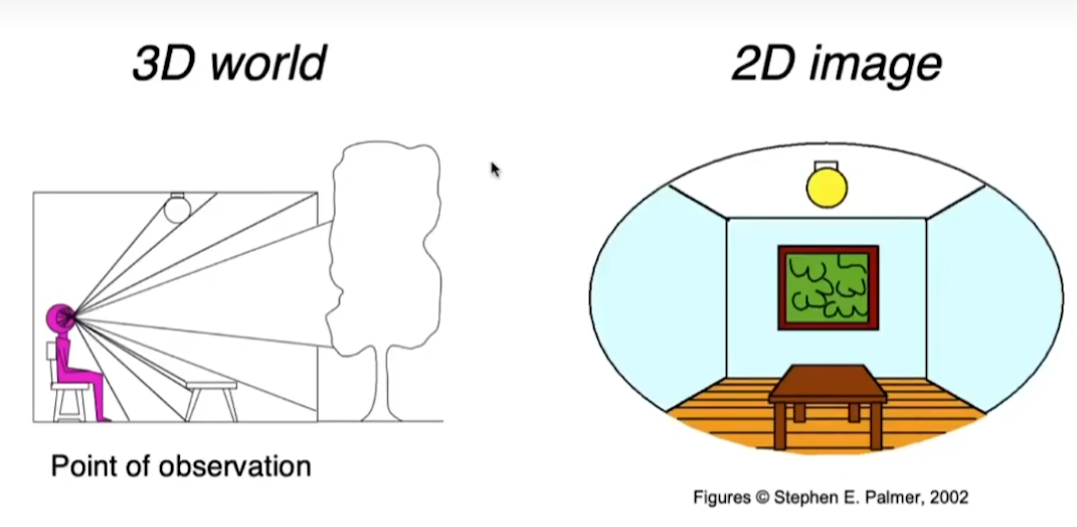
Viewing Transformation 观测变换
观测变换的目的
将视角观测到的三维世界转换为二维平面
MCP变换
Model
placing objects
在空间中摆放物体
View
placing camera
挑选合适的视角
Projection
拍摄
- 长焦 Orthographic
- 广角 Perspective
View/Camera Transformation 视图变换
ModelViewTransformation 模型视图矩阵
Projection Transformation 投影变换
Orthographic Projection 透视投影
Frustum 透视投影视锥的定义
参考资料
分享文章




